变电站巡检四旋翼无人机健康状态评估方法与流程
本发明涉及飞行器健康管理,具体涉及一种变电站巡检四旋翼无人机健康状态评估方法。
背景技术:
1、随着电网迅速发展,传统的人工巡检方式在处理日益增长的运维工作量和设备监测需求方面显得力不从心。目前,变电站巡检通常以人工巡检为主,高清视频和机器人巡检为辅来开展站内联合巡检,但变电站内设施布局紧凑、复杂,特别是高电压等级的ais变电站,站内设备类型多,变电站内避雷针、结构支架、绝缘子串、母线、半高层构架等高处设备距离地面巡视通道远,位于地面上的人、高清视频和机器采用仰视的视角进行巡检,巡检难度大,且常存在巡检盲区,地面巡视手段无法及时发现高处设备的发热、设备破损等设备隐患和缺陷。为解决这一问题,引入无人机技术成为一项关键举措,变电站巡检无人机具备迅速机动的特点,可全面覆盖高空设备,提高巡检效率,同时降低现场作业风险。通过搭载各种传感器,无人机实现了设备状态的实时监测和数据采集,为运维工作人员提供了更全面、及时的设备运行信息。这项技术不仅提高了巡检效率,降低了运维成本,还为设备健康状态的预测和维护计划的优化提供了数据支持。
2、而变电站巡检无人机在长期投入运行的过程中,可能会出现机体老化、精度降低等问题,导致巡检的稳定性与可靠性降低,为确保无人机系统在变电站巡检中长期稳定运行,进行无人机健康状态评估变得尤为重要。通过对无人机的各项关键参数进行监测和评估,可以确保无人机系统在巡检任务中的可靠性,从而进一步提升电网设备运行的安全性和稳定性。比如相关技术中,公布号为cn114091268a的专利申请文献中提出从节点重要度出发,依据信号传播方向建立无人机系统的符号有向图模型,计算节点重要度作为层次分析法中构建判断矩阵计算权重的依据,再与劣化度结合经过模糊综合评估取得无人机的健康状态,但该方案对于评价因素的影响考虑相对单一,没有考虑多因素对无人机健康状态的影响。
3、文献“绝缘机器人健康状态评估方法研究,西安工业大学,赵梓芬”中提出采用灰色关联分析法,直接计算标准序列与待测序列的关联度,根据各指标和故障状态下参数发展趋势的相似程度进行评估指标筛选,同样对于评价因素的影响考虑相对单一,没有考虑多因素对无人机健康状态的影响。
技术实现思路
1、本发明所要解决的技术问题在于如何得到更加准确的无人机健康状态评估结果。
2、本发明通过以下技术手段解决上述技术问题的:
3、本发明提出了一种变电站巡检四旋翼无人机健康状态评估方法,所述方法包括:
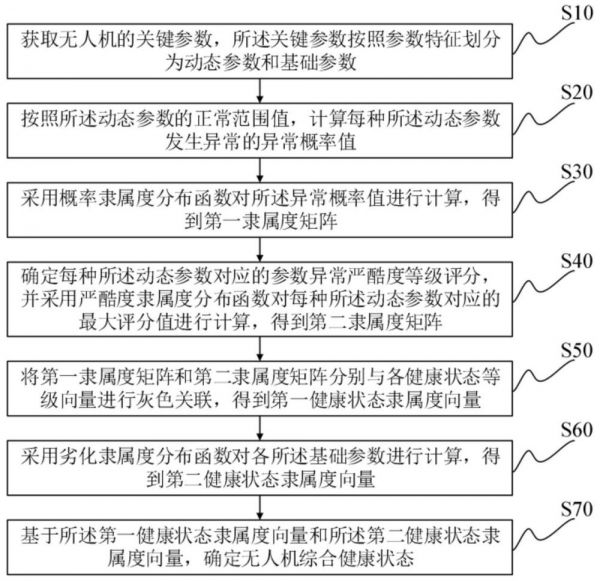
4、获取无人机的关键参数,所述关键参数按照参数特征划分为动态参数和基础参数;
5、按照所述动态参数的正常范围值,计算每种所述动态参数发生异常的异常概率值;
6、采用概率隶属度分布函数对所述异常概率值进行计算,得到第一隶属度矩阵;
7、确定每种所述动态参数对应的参数异常严酷度等级评分,并采用严酷度隶属度分布函数对每种所述动态参数对应的最大评分值进行计算,得到第二隶属度矩阵;
8、将所述第一隶属度矩阵和所述第二隶属度矩阵分别与各健康状态等级向量进行灰色关联,得到第一健康状态隶属度向量;
9、采用劣化隶属度分布函数对各所述基础参数进行计算,得到第二健康状态隶属度向量;
10、基于所述第一健康状态隶属度向量和所述第二健康状态隶属度向量,确定无人机综合健康状态。
11、进一步地,所述获取无人机的关键参数,所述关键参数按照参数特征划分为动态参数和基础参数,包括:
12、将无人机将无人机划分为动力系统、飞控系统、通信系统及机体结构,并获取各部分结构的关键参数;
13、按照参数特征划将所述关键参数划分为动态参数和基础参数;
14、其中,所述动态参数包括电机转速、电调输出电流、电子罗盘的各个方向的补偿量、高度、水平精度因子、信号强度、延迟时间和数据传输速率;所述基础参数包括电池劣化度、轴承劣化度、螺旋桨劣化度和起落架劣化度。
15、进一步地,所述按照所述动态参数的正常范围值,计算每种所述动态参数发生异常的异常概率值,包括:
16、按照各所述动态参数对应的正常范围值,将超过所对应的正常范围的参数记为异常;
17、统计各所述动态参数的异常次数,并根据异常次数计算各所述动态参数对应的异常概率值。
18、进一步地,所述概率隶属度分布函数和所述严酷度隶属度分布函数均采用三角分布。
19、进一步地,所述将所述第一隶属度矩阵和所述第二隶属度矩阵分别与各健康状态等级向量进行灰色关联,得到第一健康状态隶属度向量,包括:
20、分别将所述第一隶属度矩阵和所述第二隶属度矩阵与各健康状态等级向量进行灰色关联,得到各所述动态参数对应的灰关联系数,, k表示各所述动态参数, i表示第一隶属度矩阵或第二隶属度矩阵, j表示健康状态等级;
21、根据所述灰色关联系数,计算各所述动态参数与健康状态等级向量的灰关联度;
22、基于所述灰关联度,计算所述第一健康状态隶属度向量。
23、进一步地,所述灰关联系数的计算公式为:
24、
25、式中:表示健康状态隶属度向量中第 m个值, j表示健康状态等级分为健康、亚健康、退化、恶化和故障;时表示第一隶属度矩阵中动态参数 k对应隶属度向量中第 m个的值,时表示第二隶属度矩阵中动态参数 k对应隶属度向量中第 m个值。
26、进一步地,所述灰关联度的计算公式为:
27、
28、式中:表示灰关联度。
29、进一步地,所述基于所述灰关联度,计算所述第一健康状态隶属度向量,包括:
30、基于所述灰关联度,计算灰关联度的均值:
31、;
32、基于所述灰关联度的均值与各单因素隶属度向量组成的隶属度矩阵,计算得到第一健康状态隶属度向量,其中,,。
33、进一步地,所述劣化隶属度分布函数采用岭形分布隶属度函数。
34、进一步地,所述基于所述第一健康状态隶属度向量和所述第二健康状态隶属度向量,确定无人机综合健康状态,包括:
35、根据所述第一健康状态隶属度向量及动态参数对应的第一权重向量、所述第二健康状态隶属度向量及基础参数对应的第二权重向量,计算隶属矩阵,其中,,,、分别为所述第一权重向量和所述第二权重向量,为第一健康状态隶属度向量构成的矩阵, r为第二健康状态隶属度向量构成的矩阵;
36、根据所述隶属矩阵和第三权重,计算无人机综合健康状态,所述第三权重为无人机整体健康状态对应的权重。
37、本发明的优点在于:
38、(1)本发明获取影响无人机稳定运行的关键参数,并根据参数特性将关键参数分为动态参数和基础参数,细致的参数划分更好的量化了影响无人机系统运行的因素;对于无人机不同的参数,分别提出了不同的评估方法进行健康评估,最大化的利用每种评估方法的优点,使评估结果更精确;最后将所有评估结果进行综合,综合影响下的无人机健康状态向量,按照最大隶属度原则确定最终健康评估结果,可以更全面的判断无人机的健康状态,从而更好地预测潜在问题和提高系统的可靠性。
39、(2)通过监测无人机飞行过程中的实时运动参数和无人机传感器数据获得无人机动态参数,同时采用不同的方法计算无人机静态属性的劣化度来确定基础参数,获取的参数准确性提高,使之对特定参数的评估更为科学与准确。
40、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
相关知识
人体健康状态评估方法与流程
健康评估全身状态检查
健康状态评估
健康状况评估
锂离子电池安全状态评估研究进展
绪论、健康评估方法
健康评估(四版)
健康评估身体状况评估
《健康检测与评估》教学大纲
健康评估7.身体状况评估
网址: 变电站巡检四旋翼无人机健康状态评估方法与流程 https://www.trfsz.com/newsview881757.html
推荐资讯




- 1从出汗看健康 出汗透露你的健 3889
- 2早上怎么喝水最健康? 3671
- 3习惯造就健康 影响健康的习惯 3317
- 4五大原因危害女性健康 如何保 3226
- 5连花清瘟、布洛芬等多款感冒药 2978
- 6男子喝水喉咙里像放了刀子一样 2472
- 710人混检核酸几天出结果?1 2237
- 8第二轮新冠疫情要来了?疾控中 2232
- 9补肾吃什么 补肾最佳食物推荐 2204
- 10转阴多久没有传染性?满足四个 2171

